1. 3D Printed WALL·E Replica
Ever wanted to build your own Wall-E robot from the 2008 Pixar film? In this tutorial I describe exactly how this can be done! In 2018 I designed a fully 3D-printable Wall-E replica which can drive around and move its head and arms. In this tutorial you can download all of the 3D printer files and code I used, so that you can make your own!

2. Modular Synthesizer
Have you ever wondered how to make music with analogue electronics? While your answer is probably “no”, analogue and digital music synthesizers are regularly used by many popular bands and artists in their music. In this tutorial, I take a deep dive into the circuits which make synthesizers work and describe how you can build your own.
- Part 1: An Introduction
- Part 2: Dual 12V Power Supply
- More coming soon!

3. Useful Libraries/Code for Arduino
When writing code to program Arduino robots, it is often useful to use existing libraries and code to do common tasks. There is no point reinventing the wheel every time you start a new project! Here are some libraries I wrote which I find helpful when building robots using Arduino:
- Programs:
- Libraries:
- Servo Speed and Trajectory Controller
- More coming soon!

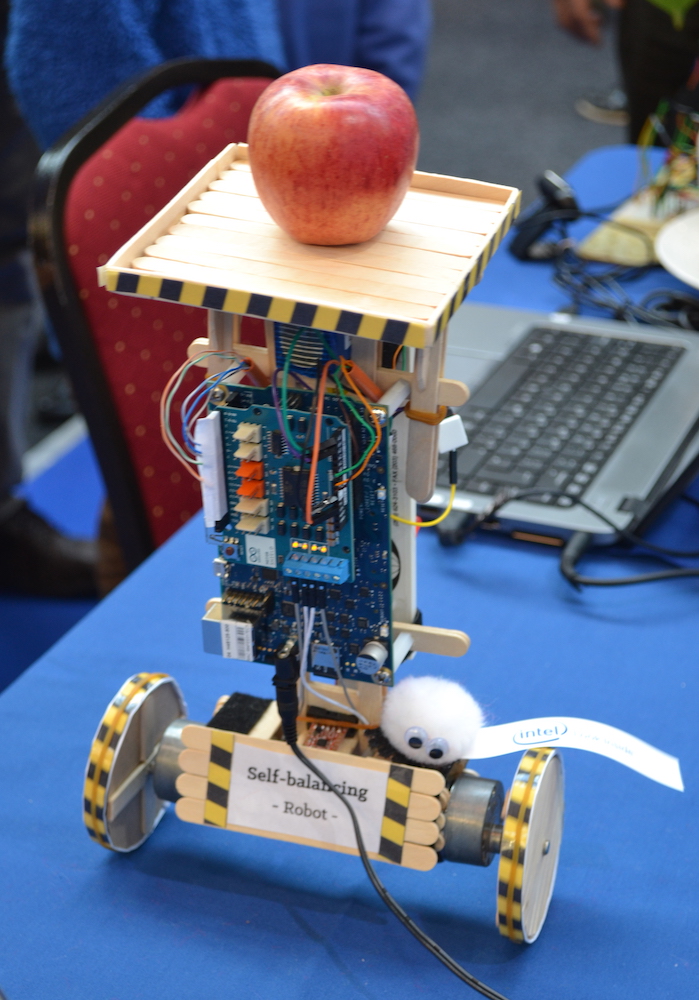
4. Building a Self-balancing Robot
This is one of my first projects which got me interest into robotics. In this tutorial series I describe how a self-balancing robot works and how to build your own. I wrote this series before I started studying Engineering in college, so some section might be a bit dated!