Up until now we have looked at all of the individual topics behind self-balancing robots. In this final part of the tutorial, I’ll bring it all together and give you some guidelines to designing and assembling your own robot!
Designing the Robot
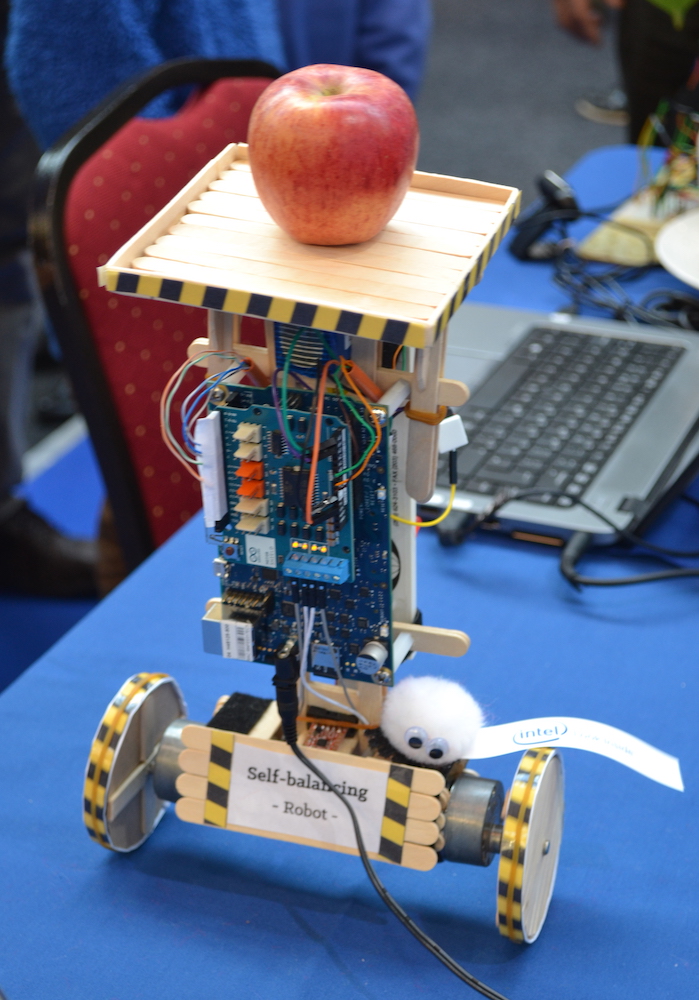
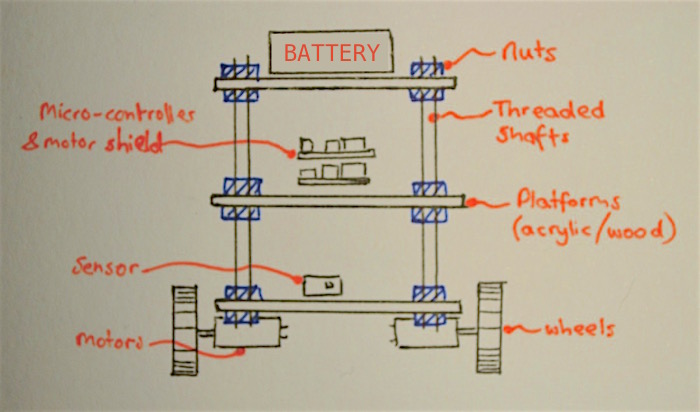
Weight Distribution: Self-balancing robots work on the principle of an inverted pendulum. This means that the system is most stable when all of the mass is positioned as high as possible. This seems to go against common sense; usually systems are more stable when they have a low centre of gravity. In this case keeping the mass on top increases the inertia of the system, meaning that the robot has more time to respond to changes in balance. Therefore my first recommendation is to place the heaviest objects, such as the battery, at the top of the robot.
Sensor Positioning: The positioning of the accelerometer/gyroscope module is also important. When I was demonstrating my balancing robot at the Dublin Maker Faire this year, I asked a number of people where they think the sensor should be positioned. Most guessed that it should be on top, as this is where it would record the largest amount of movement!
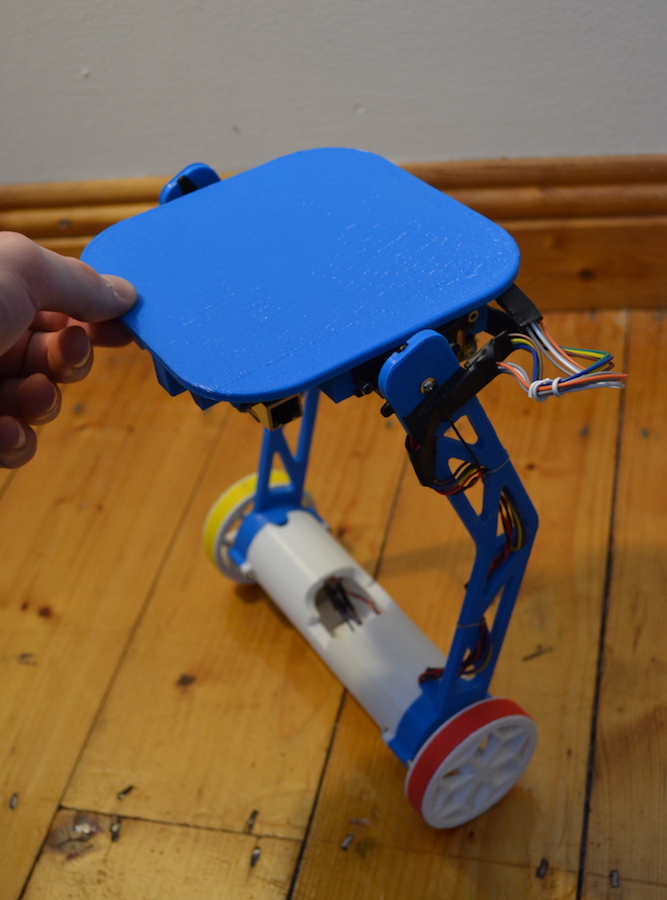
We actually want to avoid as much of this translational movement as possible, as we are only interested in the rotation of the robot. Therefore the sensor should be placed exactly on the axis of rotation, between both wheels. Placing the sensor further up on the frame introduces noise and jitter into the readings, and may cause a feedback loop (similar to the squeaking noise made when a microphone is too close to its own speaker).
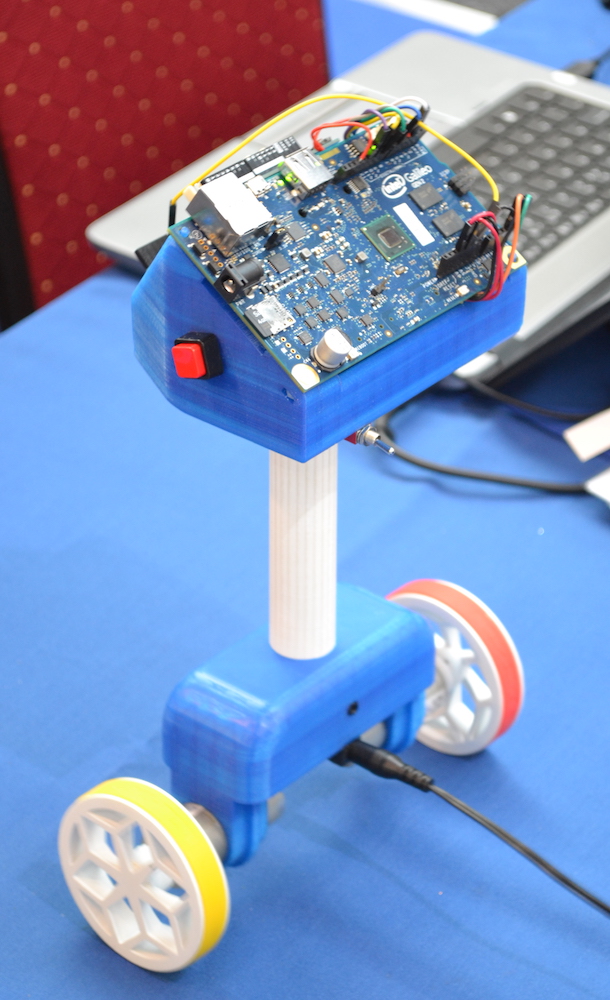
Frame Design: For the rest of the frame, it is up to your own imagination what you want to do with it. I’ve included a couple of pictures and sketches below to help you come up with your own designs. Although I 3D printed two of my frames, I made my first prototype out of lollipop sticks (and it worked really well)!
Assembling the Frame
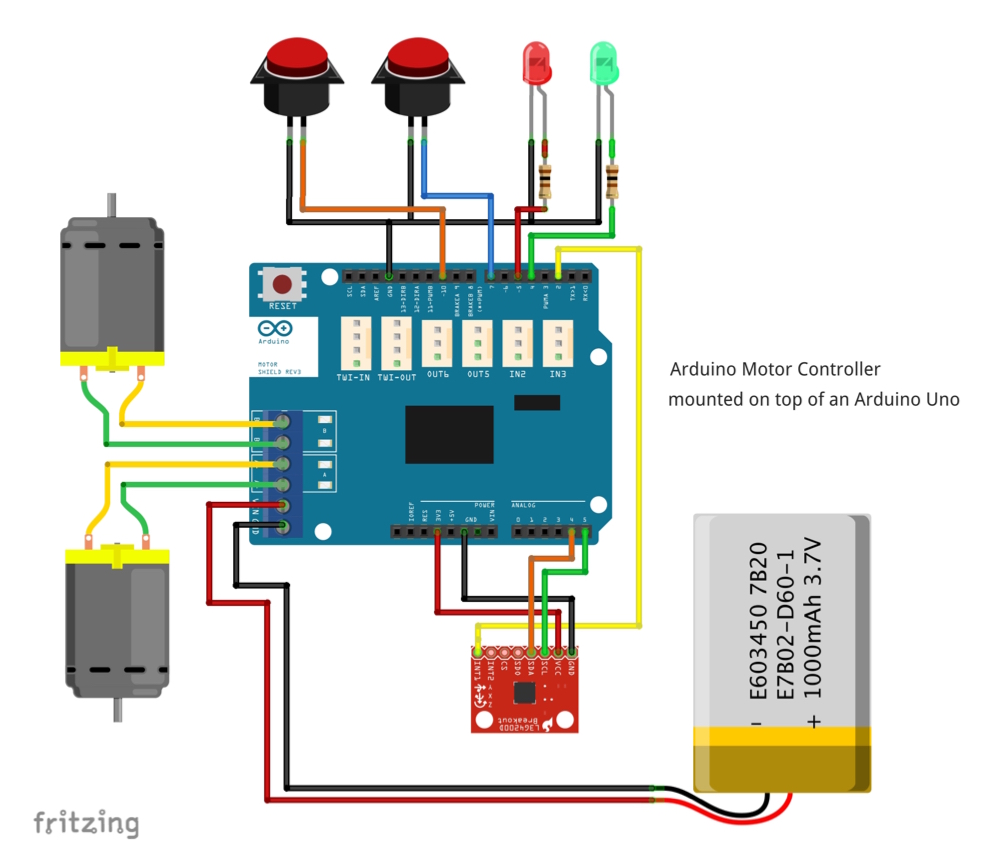
Putting together the frame and electronics is actually the easiest part of the project! Once you have your frame designed and ready to go, all you have to do is stick/screw all of the components together. Here is a schematic I made to help you with the wiring of the robot:


Combined Program
In the previous parts of the tutorial I included snippets of code to show you how each part of the self-balancing robot should work. Here I have compiled all of the parts together into one code that you can use and modify for your own robot. I included a horrendous amount of comments, so that the program is as easy to follow as possible!
Note: This code is programmed for the specific components I was using, such as an Arduino motor shield, and the MPU6050 Accel-Gyro module.
/* * * * * * * * * * * * * * * * * * * * * *
* SELF-BALANCING ROBOT
* =========================================
*
* Code by: Simon Bluett
* Email: hello@chillibasket.com
* Website: wired.chillibasket.com
*
* 7/10/15, Version 2.0
*
* Here are some hints when you try to use this code:
*
* > Ensure pin-mapping is correct for your robot (line 54)
* > Ensure calibration values are correct for your sensor (line 181)
* > Uncomment (line 700) in order to see if your sensor is working
* > Play with your PID values on (line 93)
* > Ensure that your left & right motors aren't inverted (line 355)
* > Confirm whether you want the Pitch ypr[1] or Roll ypr[2] sensor readings!
* * * * * * * * * * * * * * * * * * * * * */
/* * * * * * * * * * * * * * * * * * * * * *
* This Demo makes use of the I2Cdev and MPU6050 libraries, and the demonstration
* sketch written by (Jeff Rowberg <jeff@rowberg.net>), modified to work
* with the Intel Galileo Development Board:
* -- -- -- -- -- -- -- -- -- -- -- -- -- --
* I2Cdev device library code is placed under the MIT license
* Copyright (c) 2012 Jeff Rowberg
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
* * * * * * * * * * * * * * * * * * * * * */
// I2Cdev and MPU6050 must be installed as libraries, or else the .cpp/.h files
// for both classes must be in the include path of your project
#include <I2Cdev.h>
#include <MPU6050_6Axis_MotionApps20.h>
#include <Wire.h>
// Specific I2C addresses may be passed as a parameter here
MPU6050 mpu; // Default: AD0 low = 0x68
// Define the pin-mapping
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
#define DIR_A 12 // Direction Pin, Motor A
#define DIR_B 13 // Direction Pin, Motor B
#define PWM_A 3 // PWM, Motor A (Left Motor)
#define PWM_B 11 // PWM, Motor B (Right Motor)
#define BRK_A 9 // Brake, Motor A
#define BRK_B 8 // Brake, Motor B
#define BTN_1 10 // On/Off Button
#define BTN_2 7 // Set Centre of Gravity Button
#define LED_1 5 // Low-battery Warning LED
#define LED_2 4 // Current mode LED
// Max PWM parameters
#define MAX_TURN 30
// MPU Control/Status
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
bool dmpReady = false; // Set true if DMP init was successful
uint8_t devStatus; // Return status after device operation (0 = success, !0 = error)
uint8_t mpuIntStatus; // Holds actual interrupt status byte from MPU
uint16_t packetSize; // Expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // Count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// Orientation/Motion
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
Quaternion q; // [w, x, y, z] Quaternion Container
VectorFloat gravity; // [x, y, z] Gravity Vector
int16_t gyro[3]; // [x, y, z] Gyro Vector
float ypr[3]; // [yaw, pitch, roll] Yaw/Pitch/Roll & gravity vector
float averagepitch[50]; // Used for averaging pitch value
// For PID Controller
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
float Kp = 8; // (P)roportional Tuning Parameter
float Ki = 2; // (I)ntegral Tuning Parameter
float Kd = 5; // (D)erivative Tuning Parameter
float lastpitch; // Keeps track of error over time
float iTerm; // Used to accumulate error (integral)
float targetAngle = 2.1; // Can be adjusted according to centre of gravity
// You can Turn off YAW control, by setting
// the Tp and Td constants below to 0.
float Tp = 0.6; // Yaw Proportional Tuning Parameter
float Td = 0.1; // Yaw Derivative Tuning Parameter
float targetYaw = 0; // Used to maintain the robot's yaw
float lastYawError = 0;
float PIDGain = 0; // Used for soft start (prevent jerking at initiation)
// Motor Control
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
int direction_A = 0; // 0 - Forwards, 1 - Backwards
int direction_B = 0; //
int brake_A = 1; // 1 - On, 0 - Off
int brake_B = 1; //
// Runtime variables
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
int modeSelect = 1; // System Mode (0 = off, 1 = normal, 2 = guided)
bool initialised = true; // Is the balancing system on?
char inchar = 0; // Hold any incoming characters
float angular_rate = 0; // Used to make sure rate is ~0 when balance mode is initiated
bool newCalibration = false; // If set TRUE, the target angles are recalibrated
// Variables used for timing control
// Aim is 10ms per cycle (100Hz)
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
#define STD_LOOP_TIME 9
unsigned long loopStartTime = 0;
unsigned long lastTime; // Time since PID was called last (should be ~10ms)
// 0 = Off, 1 = On
int modes = 0;
// ------------------------------------------------------------------
// INITIAL SETUP
// ------------------------------------------------------------------
void setup() {
Wire.begin();
// Initialize serial communication for debugging
Serial.begin(115200);
// Configure LED for output
pinMode(LED_1, OUTPUT);
pinMode(LED_2, OUTPUT);
digitalWrite(LED_1, LOW);
digitalWrite(LED_2, LOW);
// Set as input, internal pullup for buttons
pinMode(BTN_1, INPUT_PULLUP);
pinMode(BTN_2, INPUT_PULLUP);
// Configure Motor I/O
pinMode(DIR_A, OUTPUT); // Left Motor Direction
pinMode(DIR_B, OUTPUT); // Right Motor Direction
pinMode(BRK_A, OUTPUT); // Left Motor Brake
pinMode(BRK_B, OUTPUT); // Right Motor Brake
// Initialize MPU6050
mpu.initialize();
Serial.println("Testing MPU connection:");
Serial.println(mpu.testConnection() ? "> MPU6050 connection successful" : "> MPU6050 connection failed");
Serial.println("Initialising DMP");
devStatus = mpu.dmpInitialize();
/* * * * * * * * * * * * * * * * * * * *
* IMPORTANT!
* Supply your own MPU6050 offsets here
* Otherwise robot will not balance properly.
* * * * * * * * * * * * * * * * * * * */
mpu.setXGyroOffset(93);
mpu.setYGyroOffset(-15);
mpu.setZGyroOffset(30);
mpu.setXAccelOffset(-2500);
mpu.setYAccelOffset(1783);
mpu.setZAccelOffset(877);
// Make sure it worked (returns 0 if so)
if (devStatus == 0) {
Serial.println("Enabling DMP");
mpu.setDMPEnabled(true);
mpuIntStatus = mpu.getIntStatus();
// Set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println("DMP Ready! Let's Proceed.");
Serial.println("Robot is now ready to balance. Hold the robot steady");
Serial.println("in a vertical position, and the motors should start.");
dmpReady = true;
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// In case of an error with the DMP
if(devStatus == 1) Serial.println("> Initial Memory Load Failed");
else if (devStatus == 2) Serial.println("> DMP Configuration Updates Failed");
}
}
// -------------------------------------------------------------------
// PID CONTROLLER
// -------------------------------------------------------------------
int PID(float pitch) {
// Calculate time since last time PID was called (~10ms)
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
unsigned long thisTime = millis();
float timeChange = float(thisTime - lastTime);
// Calculate Error
float error = targetAngle - pitch;
// Calculate our PID terms
// PID values are multiplied/divided by 10 in order to allow the
// constants to be numbers between 0-10.
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
float pTerm = Kp * error * 10;
iTerm += Ki * error * timeChange / 10;
float dTerm = Kd * (pitch - lastpitch) / timeChange * 100;
if (Ki == 0) iTerm = 0;
lastpitch = pitch;
lastTime = thisTime;
// Obtain PID output value
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
float PIDValue = pTerm + iTerm - dTerm;
// Set a minimum speed (motors will not move below this - can help to reduce latency)
//if(PIDValue > 0) PIDValue = PIDValue + 10;
//if(PIDValue < 0) PIDValue = PIDValue - 10;
// Limit PID value to maximum PWM values
if (PIDValue > 255) PIDValue = 255;
else if (PIDValue < -255) PIDValue = -255;
return int(PIDValue);
}
// -------------------------------------------------------------------
// YAW CONTROLLER
// -------------------------------------------------------------------
int yawPD(int yawError) {
// Calculate our PD terms
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
float pTerm = Tp * yawError;
float dTerm = Td * (yawError - lastYawError) / 10;
lastYawError = yawError;
// Obtain PD output value
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
int yawPDvalue = int(-pTerm + dTerm);
// Limit PD value to maximum
if (yawPDvalue > MAX_TURN) yawPDvalue = MAX_TURN;
else if (yawPDvalue < -MAX_TURN) yawPDvalue = -MAX_TURN;
//Serial.print("Error: ");
//Serial.print(yawError);
//Serial.print(" - PD: ");
//Serial.println(yawPDvalue);
return yawPDvalue;
}
// -------------------------------------------------------------------
// MOVEMENT CONTROLLER
// -------------------------------------------------------------------
// This function calculate the PWM output required to keep the robot
// balanced, to move it back and forth, and to control the yaw.
void MoveControl(int pidValue, float yaw){
// Set both motors to this speed
int left_PWM = pidValue;
int right_PWM = pidValue;
/* YAW CONTROLLER */
// Check if turning left or right is faster
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
int leftTurn, rightTurn;
float newYaw = targetYaw;
if((yaw > 0) && (newYaw < 0)){
rightTurn = yaw + abs(newYaw);
leftTurn = (180 - yaw) + (180 - abs(newYaw));
} else if ((yaw < 0) && (newYaw > 0)){
rightTurn = (180 - abs(yaw)) + (180 - newYaw);
leftTurn = abs(yaw) + newYaw;
} else if (((yaw > 0) && (newYaw > 0)) || ((yaw < 0) && (newYaw < 0))){
rightTurn = newYaw - yaw;
if (rightTurn > 0){
leftTurn = rightTurn;
rightTurn = 360 - leftTurn;
} else if (rightTurn < 0){
rightTurn = abs(rightTurn);
leftTurn = 360 - abs(rightTurn);
} else if (rightTurn == 0){
rightTurn = leftTurn = 0;
}
}
// Apply yaw PD controller to motor output
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if ((leftTurn == 0) && (rightTurn == 0)){
// Do nothing
} else if (leftTurn <= rightTurn){
leftTurn = yawPD(leftTurn);
left_PWM = left_PWM - leftTurn;
right_PWM = right_PWM + leftTurn;
} else if (rightTurn < leftTurn){
rightTurn = yawPD(rightTurn);
left_PWM = left_PWM + rightTurn;
right_PWM = right_PWM - rightTurn;
}
// Limits PID to max motor speed
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if (left_PWM > 255) left_PWM = 255;
else if (left_PWM < -255) left_PWM = -255;
if (right_PWM > 255) right_PWM = 255;
else if (right_PWM < -255) right_PWM = -255;
// Send command to left motor
if (left_PWM >= 0) Move(0, 0, int(left_PWM)); // '0' = Left-motor, '1' = Right-motor
else Move(0, 1, (int(left_PWM) * -1));
// Send command to right motor
if (right_PWM >= 0) Move(1, 1, int(right_PWM)); // '0' = Forward, '1' = Backward
else Move(1, 0, (int(right_PWM) * -1));
}
// -------------------------------------------------------------------
// MOTOR CONTROLLER
// -------------------------------------------------------------------
void Move(int motor, int direction, int speed) {
// Left Motor
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if (motor == 0){
// Set motor direction (only if it is currently not that direction)
if (direction == 0){
if (direction_A == 1) digitalWrite(DIR_A, HIGH); // Forwards
direction_A = 0;
} else {
if (direction_A == 0) digitalWrite(DIR_A, LOW); // Backwards
direction_A = 1;
}
// Release brake (only if brake is active)
if (brake_A == 1){
digitalWrite(BRK_A, LOW);
brake_A = 0;
}
// Send PWM data to motor A
analogWrite(PWM_A, speed);
// Right Motor
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
} else if (motor == 1){
// Set motor direction (only if it is currently not that direction)
if (direction == 0){
if (direction_B == 1) digitalWrite(DIR_B, HIGH); // Forwards
direction_B = 0;
} else {
if (direction_B == 0) digitalWrite(DIR_B, LOW); // Backwards
direction_B = 1;
}
// Release brake (only if brake is active)
if (brake_B == 1){
digitalWrite(BRK_B, LOW);
brake_B = 0;
}
// Send PWM data to motor A
analogWrite(PWM_B, speed);
// Stop both motors
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
} else if (motor = 3){
analogWrite(PWM_A, 0);
analogWrite(PWM_B, 0);
digitalWrite(BRK_A, HIGH);
digitalWrite(BRK_B, HIGH);
brake_A = 1;
brake_B = 1;
}
}
// -------------------------------------------------------------------
// READ INPUT FROM SERIAL
// -------------------------------------------------------------------
void readSerial() {
// Initiate all of the variables
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
int changestate = 0; // Which action needs to be taken?
int no_before = 0; // Numbers before decimal point
int no_after = 0; // Numbers after decimal point
bool minus = false; // See if number is negative
inchar = Serial.read(); // Read incoming data
if (inchar == 'P') changestate = 1;
else if (inchar == 'I') changestate = 2;
else if (inchar == 'D') changestate = 3;
// Tell robot to calibrate the Centre of Gravity
else if (inchar == 'G') calibrateTargets();
// Records all of the incoming data (format: 00.000)
// And converts the chars into a float number
if (changestate > 0){
if (Serial.available() > 0){
// Is the number negative?
inchar = Serial.read();
if(inchar == '-'){
minus = true;
inchar = Serial.read();
}
no_before = inchar - '0';
if (Serial.available() > 0){
inchar = Serial.read();
if (inchar != '.'){
no_before = (no_before * 10) + (inchar - '0');
if (Serial.available() > 0){
inchar = Serial.read();
}
}
if (inchar == '.'){
inchar = Serial.read();
if (inchar != '0'){
no_after = (inchar - '0') * 100;
}
if (Serial.available() > 0){
inchar = Serial.read();
if (inchar != '0'){
no_after = no_after + ((inchar - '0') * 10);
}
if (Serial.available() > 0){
inchar = Serial.read();
if (inchar != '0'){
no_after = no_after + (inchar - '0');
}
}
}
}
}
// Combine the chars into a single float
float answer = float(no_after) / 1000;
answer = answer + no_before;
if (minus) answer = answer * -1;
// Update the PID constants
if (changestate == 1){
Kp = answer;
Serial.print("P - ");
} else if (changestate == 2){
Ki = answer;
Serial.print("I - ");
} else if (changestate == 3){
Kd = answer;
Serial.print("D - ");
}
Serial.print("Constant Set: ");
Serial.println(answer, 3);
} else {
changestate = 0;
}
}
}
// -------------------------------------------------------------------
// RECALIBRATE TARGET VALUES
// -------------------------------------------------------------------
// Takes a number of readings and gets new values for the target angles.
// Robot must be held upright while this process is being completed.
void calibrateTargets(){
targetAngle = 0;
targetYaw = 0;
for(int calibrator = 0; calibrator < 50; calibrator++){
accelgyroData();
targetAngle += pitch();
targetYaw += yaw();
delay(10);
}
// Set our new value for Pitch and Yaw
targetAngle = targetAngle / 50;
targetYaw = targetYaw / 50;
Serial.print("Target Pitch: ");
Serial.print(targetAngle, 3);
Serial.print(", Target Yaw: ");
Serial.print(targetYaw, 3);
newCalibration = false;
}
// -------------------------------------------------------------------
// GET PITCH AND YAW VALUES
// -------------------------------------------------------------------
// This simply converts the values from the accel-gyro arrays into degrees.
float pitch(){
return (ypr[1] * 180/M_PI);
}
float yaw(){
return (ypr[0] * 180/M_PI);
}
float angRate(){
return -((float)gyro[1]/131.0);
}
// -------------------------------------------------------------------
// GET ACCEL_GYRO DATA
// -------------------------------------------------------------------
void accelgyroData(){
// Reset interrupt flag and get INT_STATUS byte
mpuIntStatus = mpu.getIntStatus();
// Get current FIFO count
fifoCount = mpu.getFIFOCount();
// Check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// Reset so we can continue cleanly
mpu.resetFIFO();
Serial.println("Warning - FIFO Overflowing!");
// otherwise, check for DMP data ready interrupt (this should happen exactly once per loop: 100Hz)
} else if (mpuIntStatus & 0x02) {
// Wait for correct available data length, should be less than 1-2ms, if any!
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
// Get sensor data
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGyro(gyro, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
mpu.resetFIFO();
//Serial.print(ypr[1]);
//Serial.print(" - ");
//Serial.println(ypr[0]);
}
}
// -------------------------------------------------------------------
// MAIN PROGRAM LOOP
// -------------------------------------------------------------------
void loop() {
// If the "SET" button is pressed
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if (digitalRead(BTN_2) == LOW){
digitalWrite(LED_1, HIGH);
calibrateTargets();
lastpitch = 0;
iTerm = 0;
Serial.println("> Setting new centre of gravity <");
delay(250);
mpu.resetFIFO();
digitalWrite(LED_1, LOW);
}
// If the "POWER" button is pressed
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if (digitalRead(BTN_1) == LOW){
if (modeSelect == 1){
Serial.println("> Turning off balancing system <");
initialised = false;
modeSelect = 0;
Move(3,0,0); // Stop both motors from moving
digitalWrite(LED_2, LOW);
} else if (modeSelect == 0){
Serial.println("> Turning on balancing system <");
initialised = false;
modeSelect = 1;
digitalWrite(LED_2, HIGH);
}
delay(500);
mpu.resetFIFO();
}
// Gather data from MPU6050
accelgyroData();
// If the Balance System is turned on:
if (modeSelect == 1){
if (!initialised){
// Wait until robot is vertical and angular rate is almost zero:
if ((pitch() < targetAngle+0.1) && (pitch() > targetAngle-0.1) && (abs(angRate()) < 0.3)){
Serial.println(">>>> Balancing System Active <<<<");
initialised = true;
lastpitch = pitch();
iTerm = 0;
}
// Otherwise, run the PID controller
} else {
// Stop the system if it has fallen over:
if ((pitch() < -45) || (pitch() > 45)){
// Stop the motors
Move(3, 0, 0);
// Reset runtime variables
lastpitch = 0;
iTerm = 0;
initialised = false;
Serial.println(">>>> Balancing System Stopped <<<<");
} else {
// A bit of function-ception happening here:
//Serial.println(pitch());
MoveControl(PID(pitch()), yaw());
}
}
}
if (Serial.available() > 0){ // If new PID values are being sent by the interface
readSerial(); // Run the read serial method
}
// Call the timing function
// Very important to keep the response time consistent!
timekeeper();
}
// -------------------------------------------------------------------
// TIME KEEPER
// -------------------------------------------------------------------
void timekeeper() {
// Calculate time since loop began
float timeChange = millis() - loopStartTime;
// If the required loop time has not been reached, please wait!
if (timeChange < STD_LOOP_TIME) {
delay(STD_LOOP_TIME - timeChange);
}
// Update loop timer variables
loopStartTime = millis();
}Here is a breakdown of how to use this code with your robot:
- Before starting the program, connect the board via USB to your computer, and open a terminal window in the Arduino software (baud rate: 115200).
- Wait until robot is ready: At the start the robot automatically initialises the MPU6050 module. Once this is done, the following message should appear:
DMP Ready! Let's Proceed. - Set Centre of Gravity: You should set the centre of gravity of the robot, so that the robot knows which way is up! Do this by steadily holding the robot upright, with the wheels off the floor, and pressing the button connected to GPIO-4. The LED on GPIO-2 will flash, and the following message should appear:
> Setting new centre of gravity < - Automatic On/Off: The motors of the robot automatically turn off if the robot has fallen over, or is lying on its side. To turn them back on, hold the robot steadily in an upright position. The motors should start and the following message appear:
>>>> Balancing System Active <<<<
If the robot has fallen over and motors are off, this message appears:>>>> Balancing System Stopped <<<< - Manual On/Off: To manually turn the balancing system on/off, press the button connected to GPIO-7. The LED on GPIO-10 will be bright, if the balancing system is turned on. One of the following messages will appear to let you know which state the robot is in:
> Turning off balancing system <> Turning on balancing system < - Sending new PID values: Please read my guide The PID Controller, to see how to calibrate your robot. You can send new PID values via the console window, by typing the letter of the constant (P, I or D) you want to set, followed by the number you want to set it at. Then press the enter/return key to send. The code accepts any numbers between 0.01 – 99.99. For example:
P8.2 I1.51 D15
This sets the [P]roportional Constant to 8.2, the [I]ntegral Constant to 1.51, and the [D]erivative Constant to 15.
Dealing with Common Errors
I have found that most of the common errors can be dealt with by checking the following:
- Check the Pin Mapping: Make sure that the GPIO number on (lines 54-65) match up with the ones you are using on your robot.
- Update the MPU-6050 Offsets: Each sensor has unique offset values, which have to be inputted on (lines 183-188). I explain how to find these offsets in my “Calibrating & Optimising the MPU6050” part of this tutorial.
- Ensure sensor is working properly: Check that the MPU-6050 is working, by uncommenting (line 704) of my code. While running, the robot should display the current angle on the console. When held upright, the angle should be 0. When pitching forwards/backwards, the number should be positive/negative in degrees.
- Both motors should spin in same direction: Set the turning constants on (lines 102-103) to zero. Now both motors should spin in same direction. If not, then one of the motors is wired backwards.
- Motors balance in wrong direction: Instead of stopping the robot from falling, the motors speed up the fall. This means that both motors are wired in backwards!
This finally concludes my tutorial about self-balancing robots! If you have any questions or suggestions, please leave a comment below.
Updated: 23rd May 2019 – Reformatted post