Putting it all together!
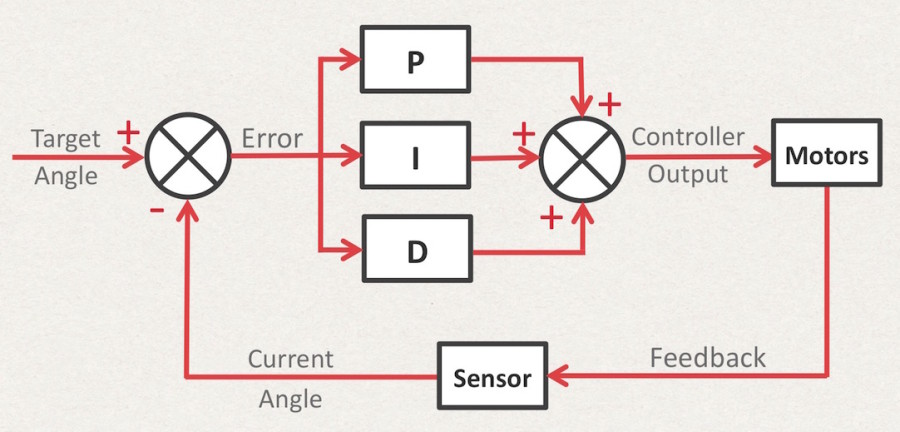
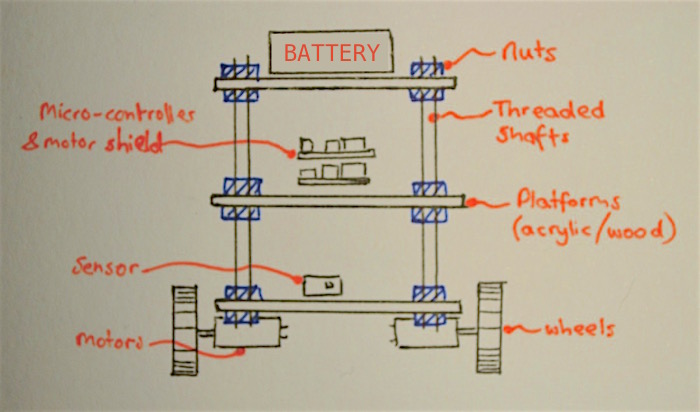
Up until now we have looked at all of the individual topics behind self-balancing robots. In this final part of the tutorial, I'll bring it all together and give you some guidelines to designing…
65 Comments
October 8, 2015