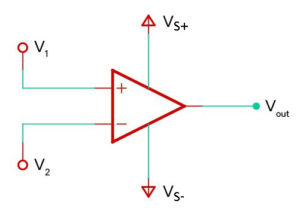
Modular Synth – Common Op. Amp Circuits Post published:June 26, 2022 Post comments:0 Comments Continue ReadingModular Synth – Common Op. Amp Circuits
Modular Synth – Dual 12V Power Supply Post published:June 14, 2020 Post comments:7 Comments Continue ReadingModular Synth – Dual 12V Power Supply
Modular Synth – An Introduction Post published:June 9, 2020 Post comments:0 Comments Continue ReadingModular Synth – An Introduction
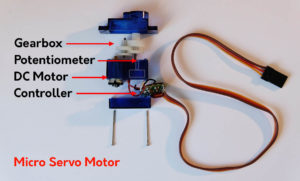
Servo Trajectory Controller for Arduino Post published:May 19, 2020 Post comments:11 Comments Continue ReadingServo Trajectory Controller for Arduino
3D printed Wall-E Post published:September 25, 2018 Post comments:2 Comments Continue Reading3D printed Wall-E
Miniature Quadcopter Post published:July 23, 2017 Post comments:0 Comments Continue ReadingMiniature Quadcopter
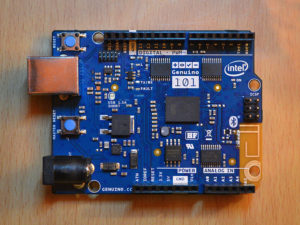
Arduino 101 – An Introduction Post published:October 24, 2016 Post comments:1 Comment Continue ReadingArduino 101 – An Introduction
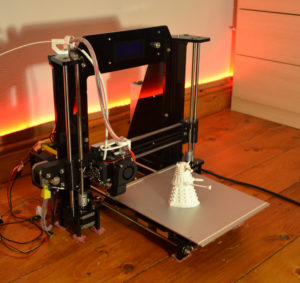
Assembling a 3D Printer Post published:June 19, 2016 Post comments:0 Comments Continue ReadingAssembling a 3D Printer
Putting it all together! Post published:October 8, 2015 Post comments:65 Comments Continue ReadingPutting it all together!
The PID Controller Post published:March 16, 2015 Post comments:14 Comments Continue ReadingThe PID Controller
Calibrating & Optimising the MPU6050 Post published:January 21, 2015 Post comments:62 Comments Continue ReadingCalibrating & Optimising the MPU6050
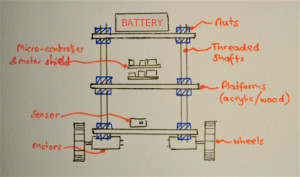
Batteries & Micro-Controllers Post published:December 16, 2014 Post comments:2 Comments Continue ReadingBatteries & Micro-Controllers
Accelerometer & Gyroscope Sensors Post published:October 9, 2014 Post comments:6 Comments Continue ReadingAccelerometer & Gyroscope Sensors
Introduction to Self-Balancing Robots Post published:September 7, 2014 Post comments:9 Comments Continue ReadingIntroduction to Self-Balancing Robots